



「鉄腕アトム」か「ペッパー」か。日本でロボットと言えばいわゆる人型が連想されがちだが、ロボットに本来求められる役割は人間を手助けし、生活を便利にすることではないだろうか。世の中では既に様々な分野でロボットが活躍しているが、本格的なロボット社会の到来はこれからだ。北九州学術研究都市では、人間とロボットが共存する未来社会を実現すべく、日々研究が行われている。
―ロボットといえば人型をイメージしてしまいます。
川原 様々な定義があると思いますが、基本的には、機械の中でも「アクチュエータ(駆動機構)」「センサ(計測機構)」「知能(情報処理装置)」で構成されているモノをロボットと呼ぶのではないでしょうか。人型でなくとも、自動車製造ラインでの溶接や製薬会社での薬品調合などを行うロボットは、高速・高精密・長時間動作が可能なため、産業界においては欠かせない存在となっています。
―ロボットはどの程度の進化を遂げているのでしょうか?
川原 介護や災害救助といった現場に導入されているロボットはまだまだ発展途上であり、課題を抱えています。これらは、産業用ロボットのような「規定された場所で動かすロボット」とは異なり、「未知の環境で動かすロボット」です。私達の研究室では、産業用ロボットに代表される精密で高精度なロボット技術(ロボット工学)と生物の特性から得た知見(医学・バイオテクノロジー)を組み合わせることで、「人間のように柔らかく適応的な動作を行える機能を持ったロボット」や「それを可能にする様々な技術」を開発し、現状の課題を解決すべく、日々研究に勤しんでいます。
―「ロボット工学と医学・バイオテクノロジーとの融合」という発想はどのようにして生まれたのですか?
川原 制御工学(ドローン)を学んでいた高専時代、「アイデア対決・全国高等専門学校ロボットコンテスト」に挑戦した際、想像以上にロボット技術が進んでいないことを痛感したことがきっかけです。ロボットはたくさんの技術の集合体であるため、ロボット工学だけでなく、様々な分野の技術が必要と考え、広島大学病院に研究員として3年間在籍し、ロボット技術を用いて医療現場の課題解決に取り組みました。具体的には、空気パルスで振動を発生させ、非接触で肺腫瘍(ガン)の位置を推定することができる「非接触硬さセンサ」を開発しました。その後、東北大学大学院・名古屋大学大学院・マサチューセッツ工科大学(以降、MIT)で研究を続ける中で、「実際に異分野の現場に入って研究を行うことの重要性」と「現状
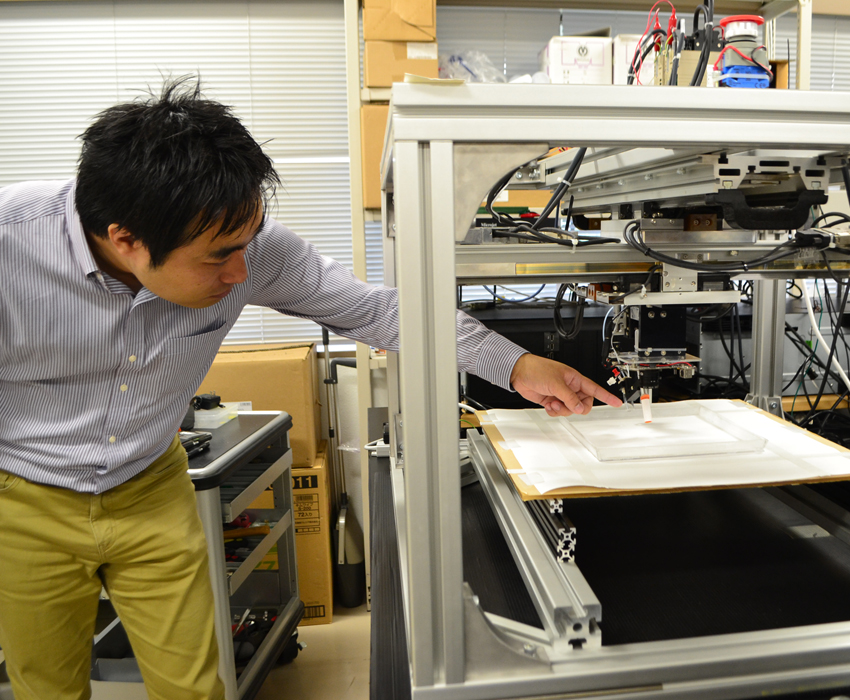 ▲地元企業と研究室の技術を結集させ独自製作した「走行性昆虫の追跡・刺激用高速ロボットシステム」。将来的には部屋全体の広さにまで拡大して飛翔する昆虫にも応用したい。
▲地元企業と研究室の技術を結集させ独自製作した「走行性昆虫の追跡・刺激用高速ロボットシステム」。将来的には部屋全体の広さにまで拡大して飛翔する昆虫にも応用したい。
のロボット工学の利点と欠点を認めた上でのアプローチの必要性」を強く感じ、前述の発想が生まれました。
特にMITでは、ロバート・サミュエル・ランガー教授が化学出身でありながら医学部で研究された経歴の持ち主であることに自身と似た部分を感じ、想いを強くしました。世界最先端の研究成果を世の中に送り出す弛まぬ努力とスピード感を現場で感じることが出来たのは非常に貴重な経験でした。
―具体的な研究内容を教えてください。
川原 まず、「ロボット顕微鏡」や「超高速アクチュエータ」などの機器を用いた微生物や昆虫の生態調査です。生物の動きを抑制せずに追跡・刺激できるロボットシステムを新たに開発しました。例えば、水中を移動する単一微生物の未知の生態や機能を明らかにすれば、「効率の良いバイオ燃料の開発」等に貢献できます。また、高速移動する昆虫の微細な足がなぜしなやかで構造的に強いのかを解明することで、例えば内視鏡手術に必要である「微細でも折れることがない次世代の外科器具の開発」に役立ちます。使用している装置やデバイスは研究室や北九州学術研究都市内のナノテクプラットホームを活用してできるだけ自作し、九州に立地する地元企業のメカトロ技術や制御システムも積極的に導入しています。
そして、高剛性フレームと酸素透過膜(シリコンゴム)を組み合わせた透明人工殻「Egg in Cube」の開発も進めています。これは、ニワトリ胚を用いた生体シミュレータです。ニワトリ胚の利点は、「安価で倫理的な制約が少ないこと」「黄身がロボットのバッテリーのような役割を果たすため、餌や培養液の供給が不要であり飼育コストがほとんどかからないこと」等が挙げられます。我々が開発した人工殻では構成素材の加工性の高さを活かして、「人工殻表面に様々な機能を集積化して生体シミュレータとしての付加価値を高める」ことに挑戦しています。人工殻表面に微細構造を形成することで複数血管の同時部分誘導に成功するなど、薬剤のスクリーニングや脳外科手術のトレーニングなどのバイオ医療分野への応用が見込まれます。
このように、現在のロボット技術を活かし、生物の機能を調べることで得られる新しい知見を用いて、次世代ロボットのための新しいセンサ・アクチュエータ・ソフトウェア等の開発に取り組んで行きたいと考えています。
実家が農業を営んでいるので、農業用ロボットの開発にも興味があります。「収穫」などの一部動作に限定すれば、生物の反射機能を応用することで、「従来のロボットが苦手としていたしなやかで頑健な動作」が実現でき、真に社会に役に立つロボット技術を創造できると考えています。
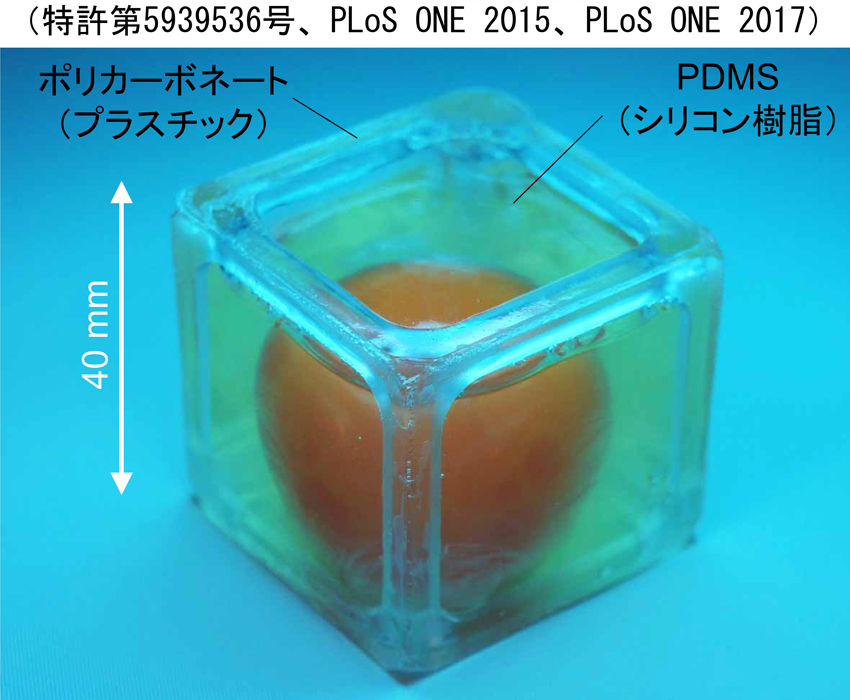 ▲実用化が目前となった「Egg in Cube」。
▲実用化が目前となった「Egg in Cube」。
![]()